About
Resume.PDF
Education
Karlsruhe Institute of Technology, Germany
2015.10 - 2018.01
Master of Science, Mechanical Engineering, focus on Mechatronics and Information Technology
Thesis Supervisors: Prof. Dr.-Ing. Christoph Stiller, Prof. Dr.-Ing J. Marius Zöllner
RWTH Aachen University, Germany
2014.10 - 2015.9
Exchange Student, Mechanical Engineering
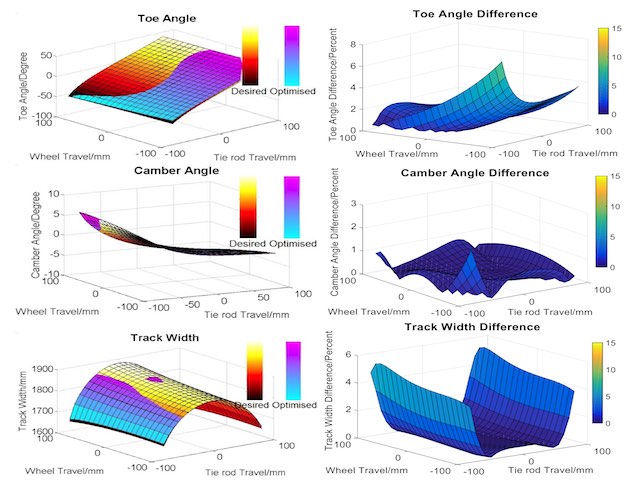
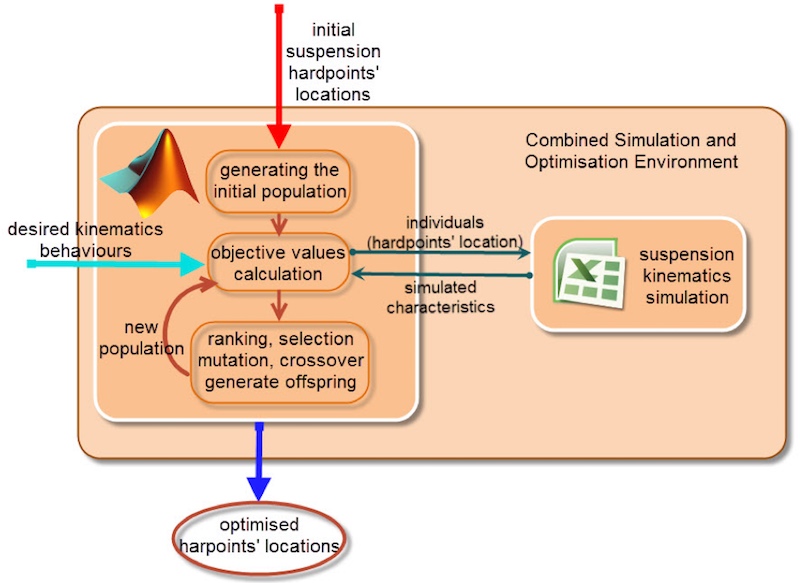
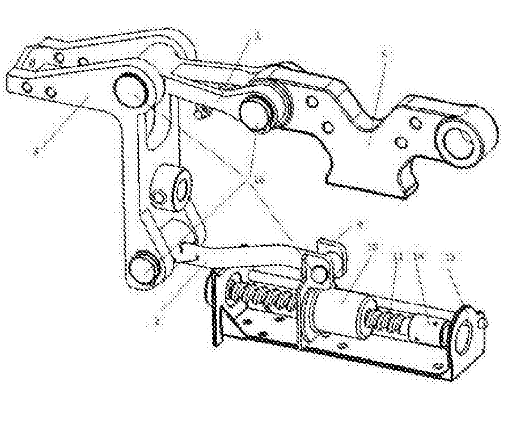
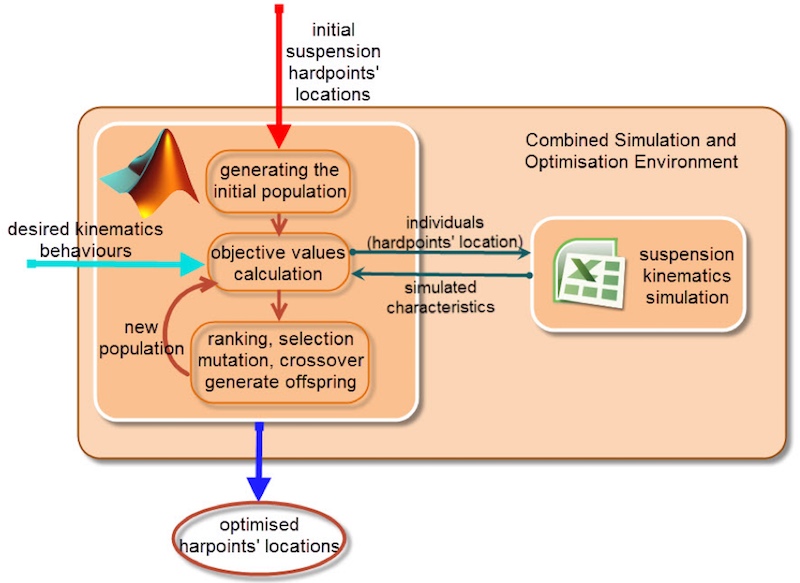
Bachelor thesis: Multi-Objective Optimization of Suspension Geometry for Achieving the Desired Wheel Kinematics Characteristics
Thesis Supervisor: Prof. Dr.-Ing. Lutz Eckstein
Beijing Institute of Technology
2011.9 - 2015.9
Bachelor of Science, Vehicle Engineering